

Tanken var ju att jag skulle lämna över till kollega Anders med bloggande om innovation men hans skrivbord råkade bli överlastat precis i dessa tider så jag gör ett inhopp och stöttar med en spaning om framtida navigationsprocesser.
Jag har skrivit om AI några gånger i tidigare bloggar men undvikit att knyta det till en maritim kontext. Jag är fullt medveten om att ge sig ut på den plankan i Sjöfartstidningen är att be om det. Men som gamle sjötrafikdirektören Göran Andersson en gång sa: ”På dom det blåser växer ingen mossa”.
Autonomous shipping är en lågoddsare som buzzword i sjöfartskretsar och det forskas och fnulas kring detta på rederikontor, maritima universitet och sjöfarts-thinktanks. Youtube erbjuder Startrek-anstrukna visioner från Rolls Royce. Det skulle vara klart 2020, flaggar reklamen… Njaee, det finns nog en viss skepticism bland sjöfarare om att just RR:s version blir standard framöver. Själv tillhör även jag de mer avvaktande.
Men icke förty så tror jag det är dags att fundera på hur AI skulle kunna betjäna sjöfarten på ett rimligt och bra sätt. Sjöfartsverket har några projekt på gång med AI inom VTS-narrativet där det letas algoritmer som räknar igenom AIS-spårdata och radarmåls följning i hisnande mängder och hastighet för att ruskigt snabbare än den 1,5 kilo tunga människohjärnan komma fram till listiga lösningar. Projekten AUTOMON, F-AUTO och Reskill har som mål att med AI som verktygskomponent ta fram beslutsstöd under trafik-, operatörs- samt systemövervakning.
Projekten greppar om att lösa en del av de problem som finns uppsatta inom de givna ramarna, dvs COLREG och UNCLOS samt mandaten inom ”recommendations for VTS and SRS”.
När (om) autonomous ships kommer hasandes över vattenöknarna, hur gör vi då? Hur interagerar en ”vanlig” båt med en obemannad? Hur fungerar regelverken då? Ombordläggningsreglementet med rötter från tidigt 1800-tal har sina kapitel om hur göra vid olika siktförhållanden. Det autonoma fartygets kameror kan troligen (?) avläsa läget och ge input till någon Rolls Royce- operatör eller AI system men hur klassar vi in det i befintliga regelverk? Räcker regel 7 i sektion 1 i TSFS 2009:44 (där fick ni!) för den typen av uppställd ekvation?
De hjälpmedel (ECDIS, AIS, GPS och Route exchange) som kommit till under senare år, levererar mängder av data och variabler som beslutsstöd men hur omhändertas deras kapacitet och möjligheter men även begränsningar inom ramen för lagboken? Utan att peka på något speciellt fall så är det idag väl känt att antikollisionsbeslut tas långt innan fartyg är i sikte av varandra och en hel del olyckor har sin upprinnelse i felaktiga och prematura beslut baserade på digital information från nämnda system.
Jag tror att en radikal genomlysning av befintliga system måste göras och att regelböckerna parallellt läggas under samma lupp för att, som jag ser det, komma fram till något som är bättre anpassat för vad vi idag faktiskt jobbar med. Albert Einstein lär ha sagt:
”We can’t solve problems by using the same kind of thinking we used when we created them.”
Vi måste tänka nytt för att lösa dels det vi har idag men framför allt, det som kommer imorgon.
Nu kommer vi till hakan som skall stickas ut, plankan som skall beträdas: AI ombord och inte iland på ett Rolls Royce-center.
Route exchange har sin upprinnelse i behovet av att fartyg (eller vaktstyrmän rättare sagt) kan se varandras planerade rutt och på så sätt ges en gemensam lägesbild. Detta skulle radikalt minska tveksamheter samt ge strålande möjligheter att i ett tidigt skede vidta förnuftiga beslut om agerande. Problemet är dock att mängden information som strömmar in och dess breda spektrum av variabler gör det svårt för vakthavande att ta långsiktiga multipla beslut bortanför de mest akuta problemen. (numera finns knappt det ordet i det offentliga rummet, allt klassas som utmaningar…suck)
Under en normal sjöresa passeras inte helt sällan områden med flera fartyg inblandade som går åt lite olika håll och med olika farter. Öresund, Engelska kanalen, Bornholms området m.fl. är lysande exempel på områden med många varianter att räkna på där AI verkligen skulle komma till sin rätt!
Idag är det så att varje fartyg, för sig, planerar för att ta sig fram genom vattnet utan att kollidera eller gå på grund, ständigt iakttagandes sjövägsregler (Colreg) separationszoner samt lokala bestämmelser längs rutten till slutdestinationen. Det finns ingen gemensamt strukturerad tankegång i vad som händer på havet, vilket UNCLOS är tydliga med genom mantrat om havens frihet och den enskilde kaptenens rättighet, utan det är fritt fram att fara omkring som var och en behagar och känner för. Läs gärna mer om Grotius och Mare Liberums konsekvenser.
Om vi skulle kasta ett snabbt öga på flygets sätt att resonera så står deras förhållningssätt om ett gemensamt ekosystem, där ALLA inblandade ingår i ETT säkerhetstänk, i våldsam kontrast mot sjöfartens ’Hawaii-system’ där alla lufsar runt med en UNCLOS-förlegad Trumpistisk filosofi ”My ship first”.
Rapporter om sjöolyckor, kollisioner och grundstötningar verkar inte ta slut trots alla nya bestämmelser och guidelines som IMO och IALA utarbetar och distribuerar. Helge Ingstad-olyckan är kanske det klarast lysande exemplet på när precis allt görs fel. Bara fartyget i sig värderades till 4-5 miljarder. Men det är väl samma budget som norska valla teamet i skid-VM?
I dagarna lanserar Kystverket ett system för VTS, som med AI skall analysera anomali i rörelsemönster (jämför Sjöfartsverkets projekt ovan) och vara ett beslut-/larmsystem för VTS-operatörer. Att Helge Ingstad-olyckan har legat som en liten blåslampa till den utvecklingen är ingen avancerad gissning.
Tyvärr är det som att linda silvertejp runt en gammal läckande slang. Det kommer snart att läcka någon annanstans. Att sätta AI att räkna på sånt är som att använda Excel för att splitta en nota för två på McDonalds.
Smartare och smartare övervakningssystem står likväl fast i det gamla tänketräsket: Alla får köra som de vill och sen spanar myndigheterna efter tokigheter, larmar och har sig.
Varför inte gå över till ett systematiserat tänk (likt flygets) att med smarta lösningar styra upp trafiken redan från början och därefter kolla så att alla sköter sig? De svunna tidernas romantiska seglatser på haven där skepparna kanske ägde sina skepp samt hade del i lasterna har ersatts av yrkesfolk som hyrs in av fartygsägare för perioder, där det mesta är reglerat på längden och tvären både vad gäller destinationer, farthållning och rutter. Folket ombord projicerar inte längre sina drömmar på vattenspegeln utan på avmönstringens hägrande möjligheter.
Ett fartyg under gång har normalt sett flera lager planeringshorisonter, dels den övergripande från avgång till ankomst där last och hamnens planering är styrande och lotsplaneringen är en viktig pusselbit. Men för navigatören är nog sjöresan av större intresse. Sjöresan i sig har flera horisonter att beakta, dels den till nästa waypoint men även 12-, 6- och 3-mils horisonten är otroligt viktiga och till sist den omedelbara manövreringen där katastrofen förhoppningsvis inskränker sig till svettiga kårar längs ryggraden, en ny skjorta samt fillingar.
Alla delar hänger ihop där helheten påverkas när man drar i ena änden. De egna kurs- och fartändringarna ingår i det gemensamma navigatoriska ekosystemet där andra fartyg, fiskebåtar och allehanda flytande och fasta begränsningar ger en inbördes komplex påverkan.
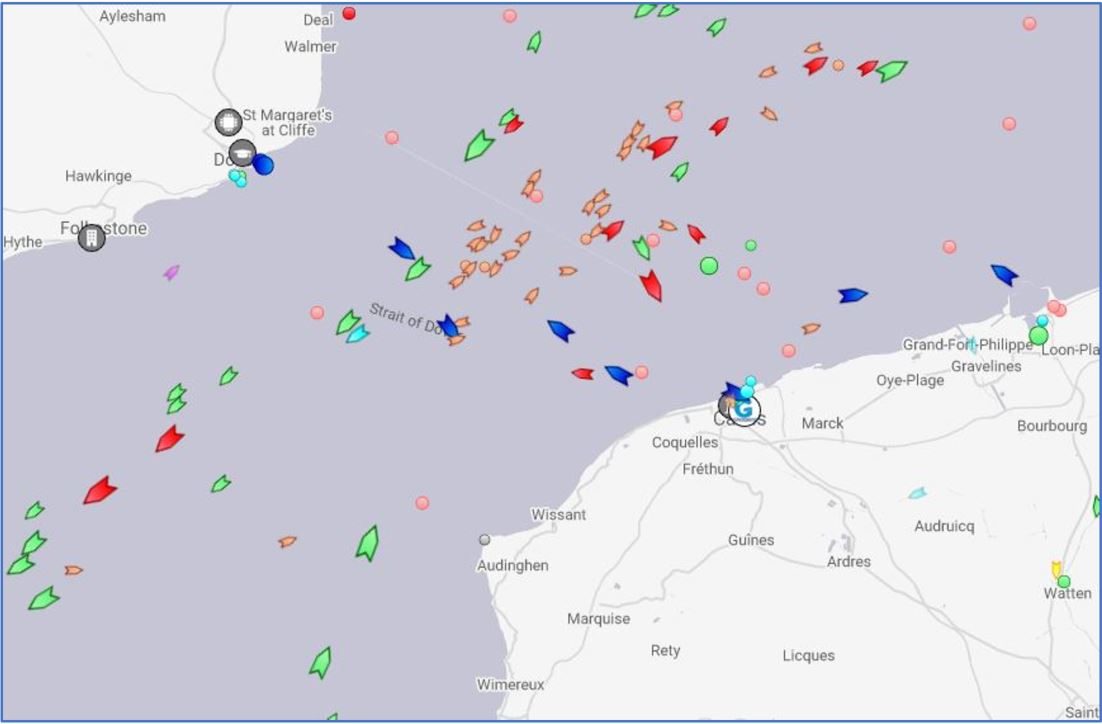
I bilden ovan kommer efter några timmar ett större antal åtgärder ha tagits i akt och mening att undvika kollision allteftersom de egna rutterna (eller fiskerimönstret) följs. Någon gemensam planeringsmodell, mer än att var och en följer Colreg efter bästa förmåga, finns inte. Huruvida alla de manövrar och fartändringar som gjordes under en viss tidsrymd var de mest optimala, de säkraste, de miljövänligaste, får vi aldrig veta. Förhoppningsvis skedde ingen olycka och det är väl det enda mätverktyg vi har idag. Ganska trubbigt i mitt tycke. Här har vi förbättringspotential i mängd!
Detta är ett klockrent område där AI verkligen skulle kunna vara ett stöd och särskilt då om var och varannan båt blir autonomt. Istället för att såsom Rolls Royce målar upp – en super VTS-central iland som styr fartygen – så skall AI och det vi idag kallar edge computing bistå dem ombord med den bästa lösningen för alla fartyg och som passar in i helheten! Läs gärna mer om edge computing.
Jag tror av flera skäl inte på stora landcentraler som styr fartyg likt drönare. Enbart det faktum att uppkopplingens robusthet är en hopplös och svårlöst teknikfråga som inte kan fuskas förbi räcker som förklaring om vi strävar efter hyfsat säker sjöfart. Det räcker med att försöka koppla upp sig några stycken för en konferens på nätet för att snabbt inse hur mycket strul det är med internet. Visst, kul om det funkar men den nivån räcker inte ute på böljan den blå.
Inom EU finns begreppet subsidiaritetsprincipen eller närhetsprincipen, vilket är en princip som innebär att beslut ska fattas på den lägsta ändamålsenliga nivån samt högre nivåers skyldighet att stödja lägre nivåer. Principen är grundläggande för Europeiska unionens funktionssätt. Lite så fungerar edge computing.
På samma sätt bör det förhålla sig med trafikstyrning till sjöss. Så långt ner i rökeriet som möjligt skall beslut tas med en eller flera högre nivåer som stödjer processen med ett helhetsperspektiv.
Hur funkar nu detta? Jo, på samma sätt som stora flockar av fåglar eller större fiskstim klarar även människor av antikollisions manövrar med stora mängder folk utan att stöta på varandra. Principen bygger på att en individ kan hantera 5–7 andra individer simultant för att få ihop rätt kurs och fart över till exempel ett större torg eller en gatukorsning utan att stöta ihop med någon annan. Detta sker inne i hjärnans svarta låda och är likt en reflex nästintill instansat från födseln. Nedan video visar fenomenet vi knappt tänker på men som fungerar ganska bra.
Förflyttar vi nu hela problematiken till terränglådan med fartyg inblandade så blir det genast mycket mer besvärligt. Det är här som AI kan triumfera över vår egen svarta låda. I ett trafikerat område som exempelvis Bornholmsgattet är det enkelt för styrman att räkna ut det första mötet med hjälp av AIS, ARPA och ECDIS. Men hur påverkar den manövern nästa möte och den därefter och alla andra möten eller tvärgångare? Vad har de andra fartygen för rutter och när kommer vi att mötas samt var någonstans?
Allas rörelser påverkar varandra i detta navigatoriska ekosystem både inom omedelbar manöverdistans men även på 3-, 6- och 12-sjömilsskalan. Det är en övermänsklig uppgift att se till helheten och försöka få till en best for all solution. Sen är det ju inte heller ett specifikt avgränsat problem i tid och rum utan möten fortsätter att rulla på ända till ankomst både för det egna och för de andra fartygen.
Det måste fortsätta vara så att kapten tar besluten men nu kan hen få hjälp av AI som löpande tillhandahåller navigatoriskt beslutsstöd. AI kan ”se” längre än det första mötet och beräkningarna sker i samarbete med de närliggande fartygens AI som gemensamt räknar fram den mest optimala lösningen för samtliga inblandade. De justerade rutterna delas vidare till högre instans/instanser (typ molnet) som gör det möjligt att vid kommande möten längre fram återigen utföra liknande gemensamma antikollisionsbeslut.
Med AI kan vi på detta sätt få sömlösa (ej att förväxla med sömnlös…) planeringshorisonter för alla inblandade där den säkraste och mest optimala helhetslösningen hela tiden ligger i fokus. Algoritmerna styrs upp med lämplig x-bränsleförbrukning, y-minimivärde för CPA (närmsta punkt för mötet) osv.
AI beräknar sedan optimala manövrar, utifrån det egna fartygets och sjöterrängens statiska som dynamiska värden, (Djupgående, isklass, masthöjd, djupkurvor, tidvatten, istjocklek, begränsningslinjer, PSSA areas m.m.) och ger löpande info med förslag på åtgärder som efter moget övervägande utförs av vakthavande.

På så sätt behåller vi initiativet ombord och med AI:s hjälp kan vi få till smarta lösningar som inte bara ser till just det egna fartygets bästa utan att helheten blir säkrad.
Nu finns ju en del att göra innan detta kan bli möjligt. Idag saknas fullständig information om fartygens Navigational status. AIS har cirka 10 status som: På väg, Till ankars, Fiskefartyg, Ej manöverfärdig m.fl. Men för att AI, både på ett bemannat som ett obemannat fartyg, skall kunna tolka alla andra Nav. Status som olika typer av fiskebåtar, dykerifartyg, mudderverk, segelsättning men även djupgående och masthöjder så måste det till kompletterande förändringar på AIS. AI kan inte ge korrekt utvärde om inte invärdena är fullständiga.
Till detta bör också läggas anakronismen Colregs snart 200-åriga upplägg med: i) i sikte av varandra ii) inte i sikte av varandra iii) oavsett i sikte av varandra osv inte längre matchar hur antikollisionsarbete och bestickföring utförs idag.
Den grundläggande orsaken till att Colreg idag är en mental artefakt, är avstampet i människans agerande som regleras för att fartygets olycka inte skall ske. För Trinity 1840 var detta det enda sättet att lösa målsättningen, dvs förebygga olycka. Endast människan var kapabel att lösa dåtidens komplexa problem. Men där är vi inte idag. Nu måste vi förutsättningslöst utgå från frågeställningen, inte människan, och därifrån ta oss an uppgiften.
När trafikverket idag vill förebygga olycka i korsningar monteras intelligenta trafikljus eller så byggs en rondell. De klamrar sig inte fast med regler vid en viftande trafikpolis i mitten som med optisk utkik längs avenyer och trottoarer och genom olika armvinklar och visselblåsningar förebygger olycka.
Målet är att olycka inte skall ske, börja i den änden och jobba vidare framåt med den teknik vi har idag och kratta i manegen för det vi ser vid horisonten. Utgå inte från vad människan skall eller inte skall göra. En idag inte helt ovanlig orsak till olycka är faktiskt ”Human factor related accident”.
Gör om och gör rätt. Men framför allt, cementera inte regelverken i runskrift. Med den utvecklingstakt samhället genomgår måste bladen i pärmarna snabbt kunna bytas ut.
Och likaledes måste den andra anakronismen UNCLOS få en rejäl genomlysning. Det om något vore väl spänstigt av Transportstyrelsen att dra på IMO:s Maritime Safety Committee-möten…
Sjöfarare tar ju de facto till sig tekniska landvinningar för att förbättra verksamheten. Magnetkompassen, sextanten, VHF, radarn, gyrot, Decca, GPS, ECDIS och AIS är strålande exempel som kantar den maritima framfarten. Det är inte 1840 utan 2021. AI har spänt på sig spikskorna. Dags att ge sig på runstenarna nu!
Hur svårt kan det vara? AI, AI, kapten!